
Introduction to Linear Algebra
Complex Variables
- Introduction
- Real numbers
- Complex numbers
- Polar representation
- Riemann's sphere
- Topology
- Integration
- Differentiation sphere
- Conformal maps
- Reduced Row-Echelon Form
- Equation A x = b
- Sensitivity of solutions
- Linear independence
- Plane transformations
- Space transformations
- Linear transformations
- Affine maps
- Exercises
- Answers
Series and Limits
- Introduction
- Defunition of derivative
- Geometric meaning
- Properties Matrix operators
- Determinants
- Cofactors
- Cramer's rule
- Equivalent matrices
- Elimination: A = L U
- PLU factorization
- Reflection
- Givens rotation
- Special matrices
- Exercises
- Answers
Differentiation
- Introduction
- Defunition of derivative
- Geometric meaning
- Properties Compositions
- Derivative of inverse
- Power rule
- Right and Left-hand derivatives
- Higher order derivatives
- Infinitesimals
- Differentials
- Extrema of a real-valued functions
- Fermat's and Rolle's theorems
- Lagrange theorem
- de l'Hospital's rule
- Dual transformations
- Direct sums
- Quotient spaces
- Rank
- Solving A x = b
- Exercises
- Answers
Integration
- Introduction
- Riemann integral
- Area and integral
- Properties of integration
- Primitive functions
- Fundamental theorem of calculus
- Integration by parts
- Indefinite integrals
- Improper integrals
- Improper integrals II
- Mean value theorems
- Double integral
- Polar coordinates
- Self-adjoint operators
Vector Calculus
- Introduction
- Vector fields
- Paths
- Line integrals
- Answers
- Inner product
- Norm and distance
- Matrix norms
- Dual norms
- Dual transformations
- Examples of transformations
Tensors
- Introduction
- LU-decomposition
- QR-decomposition
- Cholesky decomposition
- Schur decomposition
- Positive matrices
- Roots
- Polar factorization
- Spectral decomposition
- Singular values
- SVD <
- Pseudoinverse
- Exercises
- Answers
Calculus of Variations
- Introduction
- GPS problem
- Poisson equation
- Graph theory
- Error correcting codes
- Electric circuits
- Markov chains
- Cryptography
- Wave-length transfer matrix
- Computer graphics
- Linear Programming
- Hill's determinant
- Fibonacci matrices
- Discrete dynamic systems
- Discrete Fourier transform
- Fast Fourier transform
- Curve fitting
Classical mechanics
- Introduction
- Similar matrices
- Diagonalization
- Sylvester formula
- The Resolvent method
- Polynomial interpolation
- Positive matrices
- Roots <
- Pseudoinverse
- Exercises
- Answers
Quantum mechanics
- Introduction
- Circles along curves
- TNB frames
- Tensors
- Tensors in ℝ³
- Tensors & Mechanics
- Differential forms
- Calculus
- Vector Representations
- Matrix Representations
- Change of Basis
- Orthonormal Diagonalization
- Generalized Inverse
- Differential forms
Preliminaries
- Complex Number Operations
- Sets
- Polynomials
- Polynomials and Matrices
- Computer solves Systems of Linear Equations
- Location of Eigenvalues
- Power Method
- Iterative Method
- Similarity and Diagonalization
Glossary
Reference

This Book is licensed under Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License
Euler's formula

Leonhard Euler contributed to many science areas as he published more than 800 works. He was pivotal in popularizing and integrating the unit imaginary vector into mainstream mathematics, particularly through Euler's formula
Polar representation
Let xOy be an orthogonal axes system on a plane. We will identify the set ℝ², the direct product of two real lines, with the plane xy. Since ℝ² and ℂ are isomorphic as vector spaces over ℝ, it follows that we could identify the complex set ℂ with the plane xy, such that x ∈ ℝ (abscissa) and y is its ordinate. Thus, the axis x will be called the real axis, and the ordinate will be called the imaginary axis.
To every point from ℝ², it corresponds one and only one complex number from ℂ, and vice versa. Thus, there exists a bijective correspondence between the sets ℝ² and ℂ; i. e., (x, y) ←→ x + ⅉy, where ⅉ = [0, 1] is the unit vector of the ordinate. Besides rectangular coordinates, it will be convenient to use polar coordinate system. Polar coordinates describe a point's location using a distance from a central point (the pole, which is usually the origin) and an angle from a reference line (the polar axis, a ray drawn from the pole), represented as (r, θ), instead of the familiar (x, y). 'r' is the radial distance, and 'θ' (theta) is the angle, measured counter-clockwise (which is considered also as positive direction) from the positive x-axis (polar axis), making it ideal for circular or rotational systems like radar and navigation. Remember that the pole is a singular point for polar coordinate system because it corresponds to r = 0, but no angle can be associated with.
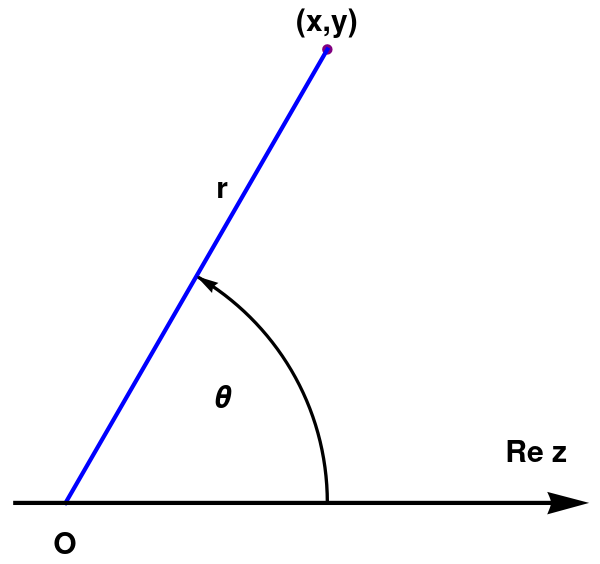
Letting z ∈ ℂ \ {(0, 0)}, z = x + ⅉy, from the relation
- Arg(z₁ z₂) = Arg(z₁) + Arg(z₂) .
- Arg(z₁/z₂) = Arg(z₁) − Arg(z₂) .
Since \[ \mbox{Arg}(z_1 ) = \mbox{Arg}\left( \frac{z_1}{z_2}\,z_2 \right) = \mbox{Arg}\left( \frac{z_1}{z_2} \right) + \mbox{Arg}(z_2 ) , \] we get \[ \forall \theta \in \mbox{Arg} \left( \frac{z_1}{z_2} \right) , \quad \exists \theta_1 ,\quad \exists \theta_2 \in \mbox{Arg} z_2 \] such that θ₁ = θ + θ₂. Therefore, \[ \theta = \theta_1 - \theta_2 \in \mbox{Arg} z_1 - \mbox{Arg} z_2 \] and thus \[ \mbox{Arg} \left( \frac{z_1}{z_2} \right) \subset \mbox{Arg} z_1 - \mbox{Arg} z_2 . \] From these relations, it follows the equality of the second point.
- Apostol, T.M., Calculus, Vol. 2: Multi-Variable Calculus and Linear Algebra with Applications to Differential Equations and Probability, Wiley; 2nd edition, 1991; ISBN-13: 978-0471000075.